Personality-Adapted Language Generation for Social Robots
Alessio Galatolo, Iolanda Leite and Katie Winkle
2023 32nd IEEE International Conference on Robot & Human Interactive Communication (RO-MAN).
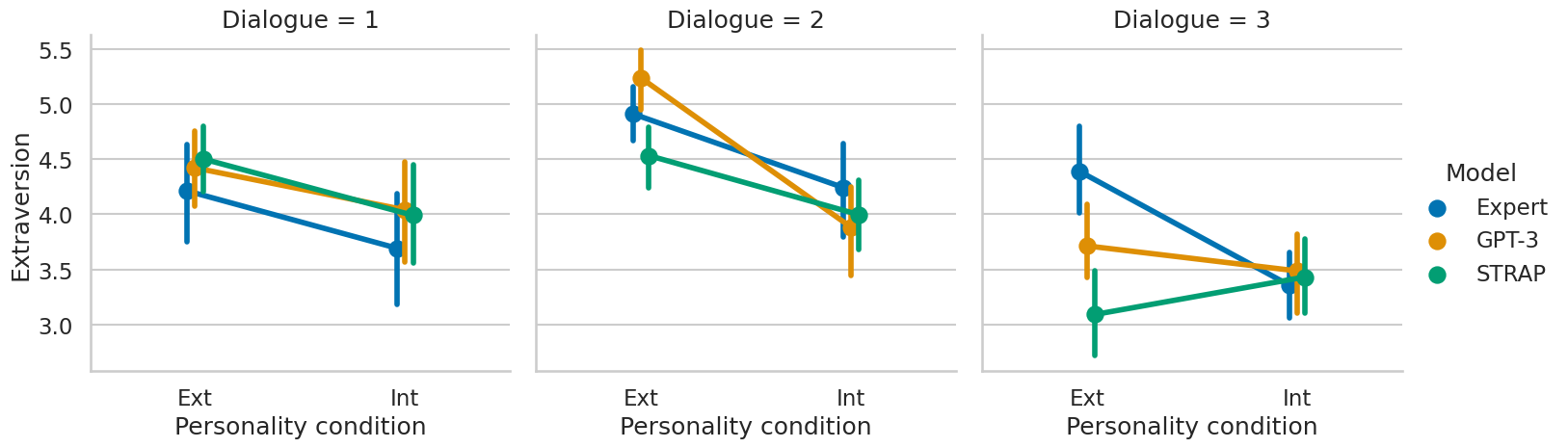
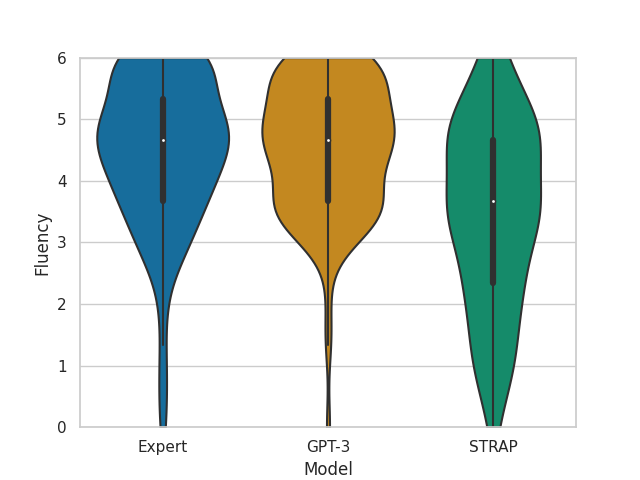
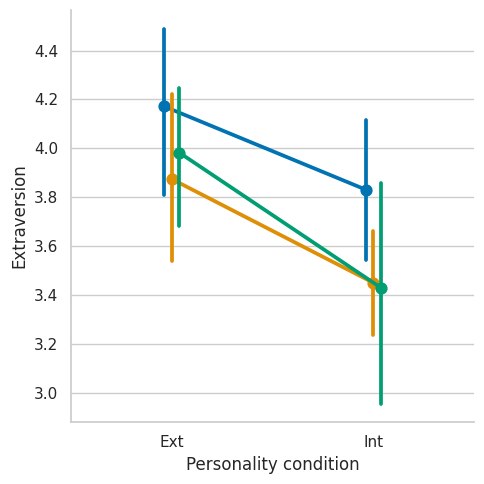
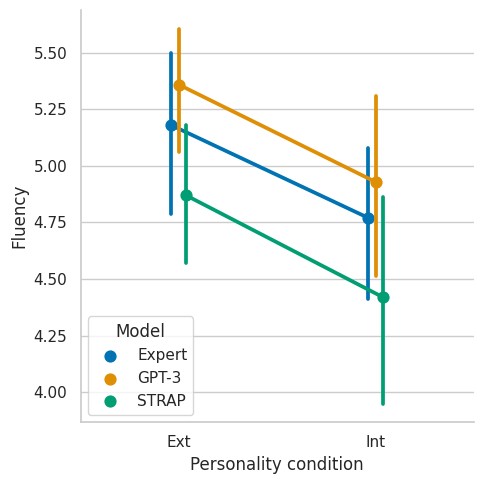
Previous works in Human-Robot Interaction have demonstrated the positive potential benefit of designing social robots which express specific personalities. In this work, we focus specifically on the adaptation of language (as the choice of words, their order, etc.) following the extraversion trait. We look to investigate whether current language models could support more autonomous generations of such personality-expressive robot output. We examine the performance of two models with user studies evaluating (i) raw text output and (ii) text output when used within multi-modal speech from the Furhat robot. We find that the ability to successfully manipulate perceived extraversion sometimes varies across different dialogue topics. We were able to achieve correct manipulation of robot personality via our language adaptation, but our results suggest further work is necessary to improve the automation and generalisation abilities of these models.
Full text (pdf) doi.org Code (github.com)